









中國企業報道8月3日訊,從前人們認為“無人駕駛”、 “機器駕駛員解放人類駕駛員”這樣的概念還遙不可及,然而英特爾正在讓這樣的構想落地。為了驅動車輪上的數據中心,英特爾當前在無人駕駛領域的發力用“不積跬步無以至千里”來形容再合適不過,而其中的的六大技術即是“跬步”,也是助力無人駕駛車輛致千里的關鍵所在。
當我們在開車的時候,什么最重要?
駕駛技術?車子性能?不,是一雙眼。
在開車的時候司機主要通過雙眼來看路,然后迅速經由大腦進行判斷并做出決策。而隨著自動駕駛時代的來臨,“機器駕駛員”則會把采集到的海量數據,實時匯入、更新到高精地圖中,再通過大數據和機器學習來做出判斷。因此,高精地圖可以將一切路況盡收“眼”底,并告訴車輛,我在哪,周圍的環境如何,接下來要如何規劃路線駛向目的地。
高精地圖對于無人駕駛車輛的導航、定位、路徑規劃與控制至關重要,直接影響了車輛行駛的效率與安全程度。由英特爾與HERE共同研發的高精地圖正是無人駕駛車輛實時洞察路況、及時做出決策的關鍵所在。
HERE高清實時地圖充分利用大數據和機器學習提供高度精確的最新信息
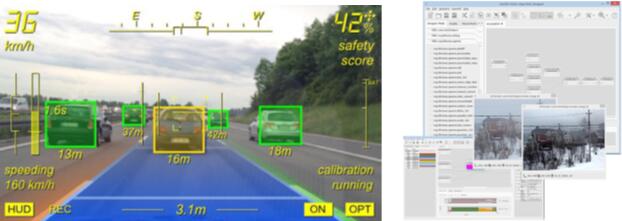
機器可讀的實時地圖,讓無人駕駛汽車預判拐角及前方路況
與我們日常看到的地圖不同,機器讀取的是分層的地圖——在底層可以識別出主干路網、車道線、海拔高度,以及周圍的路燈或路標等;在頂層則是機器地圖自修復的情況,在這一階段,高精地圖(HD Map)變成傳感器地圖(Sensor Map),因為每一輛無人駕駛汽車在行駛過程中都會捕捉到新數據,并通過影像的方式進行計算,快速分析之后就可以識別出前方路況的變化,最終進行修正再把數據傳回到無人駕駛車輛上。在這個循序漸進的過程中,英特爾在高精地圖領域的發力會推動無人駕駛加速駛向快車道,反過來,無人駕駛各細分領域的不斷升級,也會反哺高精地圖。
基于云端的參考模型,實時對比傳感器數據和車輛周圍環境
在無人駕駛的高階情景中,云端會有動態地圖,車端會有短期靜態地圖。當無人駕駛車輛行駛時,傳感器和攝像頭實時捕捉到的影像會和云端動態地圖進行比對。前方一切路況的變化都將被捕獲,并反饋到云端,經過收集和提煉,來修正車端短期靜態地圖,這是一個從動態到靜態循環往復、修正升級的過程。可以說,這是目前攀登無人駕駛高峰的一個關鍵點,因為它意味著大量路況數據的采集,并對數據進行分類和標定。在早些時候,地圖上顯示的咖啡店、加油站等,都是通過人工來標定的,但一旦進入到高精地圖階段,人工難以負荷如此海量的數據,更形象來說,高清地圖的人員配置只需100多人,而在傳統地圖中,做標定的人員在2400到2500人不等。
充分利用大數據和機器學習,為汽車提供高度精確的一手信息
機器學習是一個應用廣泛、包羅萬象的領域,其中,實時交通就是一個典型并且易于理解的關鍵點。實時交通并不是簡單地識別某一路段已發生的交通狀況,然后把這一信息下發到每一臺無人駕駛車輛中。實際上,實時交通是把歷史數據與目前整體路網數據放在一起,通過機器學習的方式做出預測。除此之外,車輛周圍景象也會運用機器學習,盡管大部分模型已經訓練完善,但如果突然捕獲到車前方出現了一個跑動速度超過平均值的人,這一樣本就會被作為特例傳回服務器,并建立新的樣本,從而識別出所有極端情況做到萬無一失。強大的機器學習就會在這一階段大顯身手。
不僅高精地圖各技術要點之間是環環相扣、互相推進的,高精地圖與無人駕駛的關系也是如此,因為一旦失去了高清地圖,路徑規劃、自定位等動作都將無法實現。如果想用一雙“隱形的手”轉動無人駕駛車輛的方向盤,由英特爾和HERE合力研發的高精地圖則是其中不可或缺的助力技術。
















 京公網安備 11010502049343號
京公網安備 11010502049343號