


一、5G車聯網的關鍵業務需求
車聯網的主體是車,車聯網的終極目標通過智能化與網聯化兩條技術路徑相融合實現控制和信息的協同,使車輛在自身智能傳感器直接探測的基礎上,通過與外部節點的信息交互,實現更加全面的環境感知,從而更好地支持車輛決策和控制,并最終可實現替代人來操作的新一代汽車——智能網聯汽車。
LTE-V2X就是提供車輛的網聯化通信技術,包括蜂窩通信(UU)和直接通信(PC5)兩種方式。其中蜂窩通信(UU)借助現有的LTE蜂窩網絡,支持高帶寬、廣覆蓋、長距離的通信連接,提供地圖下載等信息類業務。PC5模式通過終端間的直接通信,實現車輛與周邊車輛和路側基礎設施的低時延、高可靠通信,滿足碰撞預警、緊急避讓等輔助行車安全性應用要求。
5G時代,車聯網從輔助駕駛向自動駕駛發展。PC5直通模式由于近距離分布式的通信已經不能滿足自動駕駛控制的要求,需要將車、路、人、網的信息綜合分析決策后給車發控制指令,這些信息需要通過蜂窩網進行即時分發傳遞。當自動駕駛成為現實后,車的控制者駕駛員就得以解放變為乘客,車上乘客可以在高速公路上進行視頻商務會議、聯網游戲等大帶寬、高流量應用。因此5G的車聯網的業務發展需要蜂窩網既能支持低時延高可靠的控制決策指令下發,又能支持大帶寬高流量的業務信息傳遞。
二、當前網絡面臨的問題
當前4G網絡架構如下圖所示:

面對5G車聯網的業務需求,當前4G網絡已經不能滿足業務的要求。主要體現在如下方面:
1)傳輸帶寬不足
5G車輛網的實時娛樂互動單用戶要求M級的速率要求,當前4G空口的帶寬有限,尤其邊緣用戶上行受限,需要采用5G的NR實現空口速率的100倍提升。同時單用戶的速率提升,而所有用戶數據均要通過集中的核心網關轉發,對于核心網的集中傳輸壓力大。
2)網絡時延過大
5G車輛網自動駕駛控制需要10ms的時延。當前4G所有的業務需要經過多層網絡傳輸,傳輸時延大,無法滿足低時延控制指令的要求。
三、5G車聯網的網絡架構
為適應5G車聯網的業務需求,5G網絡架構需要進行如下圖所示的演進。
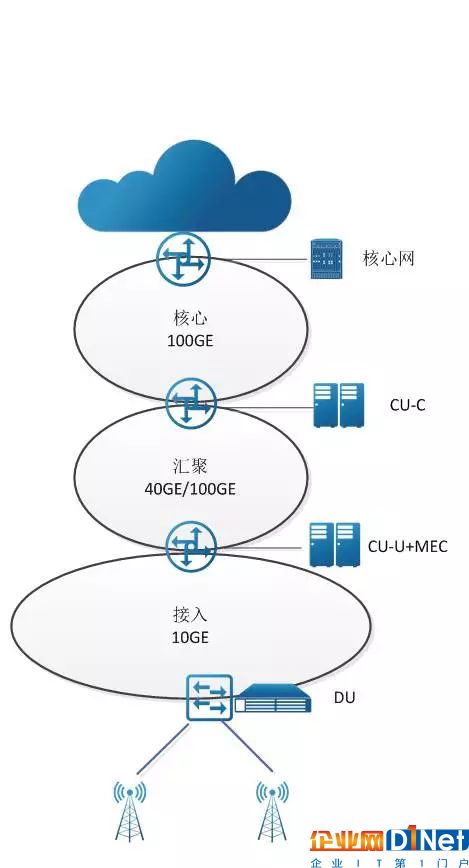
1)核心網控制和轉發分離
核心網的控制面和數據面分離,控制面仍然集中在核心層,數據面下沉到匯聚層邊緣
2)接入網CU和DU分離
接入網BBU的集中單元和分布單元分離。分布單元(DU)負責PL、MAC等實時處理,集中單元分為控制面(CU-C)和用戶面(CU-U),分別處理用戶接入相關的RRC信令和PDCP數據轉發。
5G車聯網絡架構的核心是核心網的數據面下沉后和CU-U集中部署,形成邊緣云計算節點MEC。MEC的部署使得UU口數據在網絡邊緣進行解析能減少車聯網控制數據的處理時延,同時MEC的本地數據轉發又能減輕大容量車載娛樂數據對核心傳輸環的壓力。






 京公網安備 11010502049343號
京公網安備 11010502049343號