









自動駕駛分為6個等級:
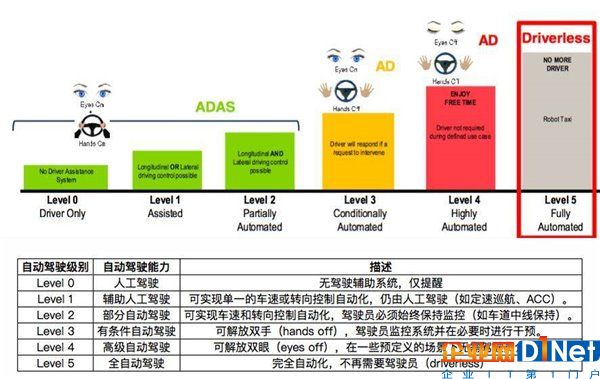
Level 0:人工駕駛,無駕駛輔助系統,僅提醒。
Level 1:輔助人工駕駛,可實現單一的車速或轉向控制自動化,仍由人工駕駛(如定速巡航、ACC)。
Level 2:部分自動駕駛,可實現車速和轉向控制自動化,駕駛員必須始終保持監控(如車道中線保持)。
Level 3:有條件自動駕駛,可解放雙手(hands off),駕駛員監控系統并在必要時進行干預。
Level 4:高級自動駕駛,可解放雙眼(eyes off),在一些預定義的場景下無需駕駛員介入。
Level 5:全自動駕駛,完全自動化,不需要駕駛員(driverless)。
自動駕駛基本原理
關于自動駕駛的基本原理,需了解三大關鍵詞:傳感器、數據融合(Data Fusion)、100%安全性決策。
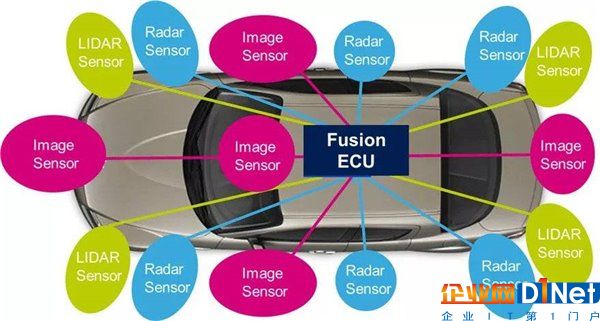
傳感器
自動駕駛需要的傳感器系統主要有三種類型:攝像頭、雷達和激光雷達。
攝像頭
攝像頭是自動駕駛必備的傳感器,包括前視、后視和360度攝像系統,后視和360度攝像頭主要提供360度外部環境呈現,前視攝像頭主要用于識別行人、車輛、道路、交通標志等。
雷達(RADAR)
自動駕駛需要多個雷達傳感器,其功能是無線探測和測距,主要用于盲點檢測、防碰撞、自動泊車、制動輔助、緊急制動和自動距離控制等應用。目前的雷達系統主要基于24GHz和77GHz,相較于24GHz,77GHz在測量距離和速度時具有更高的精度,以及更高的角分辨率,且還具備天線尺寸小、干擾小等優點。
激光雷達(LiDAR)
LiDAR,即Light Detection And Ranging的縮寫,它是一種基于激光的系統,除發射器(激光器)外,系統還具備高靈敏度的接收器。LiDAR主要用于測量靜止和移動物體的距離,并通過處理提供所檢測物體的三維圖像。
LiDAR應用于自動駕駛所面臨的挑戰是,如何克服在雨雪、霧、溫度等環境影響下識別較遠距離的物體,同時,這玩意成本太高,目前不適合汽車領域的大規模部署。
數據融合(Data Fusion)
數據融合就是將不同傳感器(如雷達、攝像頭和激光雷達)數據進行智能化合成,實現不同信息源的互補性、冗余性和合作性,從而做出更好、更安全的決策。比如攝像頭具有分辨顏色(識別指示牌和路標)的優勢,可易受惡劣天氣環境和光線的影響,但雷達在測距、穿透雨霧等有優勢,兩者互補融合可作出更精確、更可靠的評估和判斷。
100%安全性決策
一旦出現交通事故,重則導致人身傷亡,因此,自動駕駛對技術安全的要求相當苛刻,需實現接近100%的安全性。
簡而言之,自動駕駛就是通過傳感器收集全面的環境信息,再對信息融合處理,并作出接近100%安全性決策。
目前多數人所談的自動駕駛,都是基于汽車本地端的傳感器、數據融合來實現決策的。
但是,你有沒有想過,這種單憑本地端實現的方式存在一些局限性。
當汽車橫穿十字路口時,自動駕駛能預知從左側高速駛來的大卡車嗎?
由于易受雨、雪、霧、強光等環境影響,攝像頭能始終準確識別指示牌和紅綠燈嗎?
再舉一個例子。
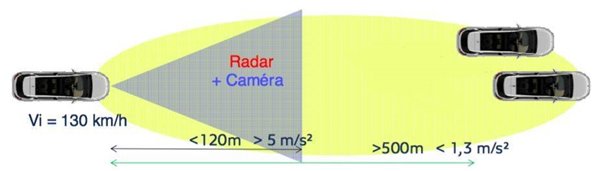
當自動駕駛在高速路上以130公里/小時行駛時,攝像機/雷達融合無法安全地檢測到前方超過120米距離外的停車,這將觸發超過5米每平方秒的緊急制動,這是無法接受的。
總之,道路環境異常復雜,雷達、攝像頭和激光雷達等本地傳感系統受限于視距、環境等因素影響,要實現100%安全性,自動駕駛需要彌補本地傳感器所欠缺的感知能力。
簡單的理解,本地傳感系統讓汽車實現了“眼觀六路”,但自動駕駛還需要“耳聽八方”。
這就需要C-V2X閃亮登場。
C-V2X能做什么?
C-V2X,C即Cellular,V2X就是vehicle-to-everything,指車與外界的信息交換,它是基于蜂窩網絡的車聯網技術。
C-V2X指從LTE-V2X到5G V2X的平滑演進,它不僅支持現有的LTE-V2X應用,還支持未來5G V2X的全新應用。它基于強大的3GPP生態系統和連續完善的蜂窩網絡覆蓋,可大幅降低未來自動駕駛和車聯網部署成本。
與雷達、激光雷達等傳感器不同,我們可以把V2X視為一種無線傳感器系統的解決方案,它允許車輛通過通信信道彼此共享信息,它可檢測隱藏的威脅,擴大自動駕駛感知范圍,能預見接下來會發生什么,從而進一步提升自動駕駛的安全性、效率和舒適性。C-V2X被認為是自動駕駛的關鍵推動因素之一。
C-V2X能做什么呢?還是繼續舉例吧。

如上圖,道路前方彎道處停有一輛拋錨的汽車,但由于正好處于彎道,汽車本地的攝像頭、雷達等傳感器無法檢測到,眼看一場車禍正要釀成悲劇。
幸運的是,我們有V2X。

V2X通過通信網絡共享信息,具有“耳聽八方”的能力,此時汽車顯示屏上會提示前方有車輛,并啟動減速和轉向,安全通過。
再來一個案例。

如上圖,前方的大卡車擋住了視線,而對面正駛來一輛汽車,此時要超車,毫無疑問是非常危險的。
當駕駛員剛打左轉燈準備超車時,V2X通過顯示屏立即提示,前方有來車,不能超車…

直到危險解除后,才順利超車,安全通過。
C-V2X技術簡介
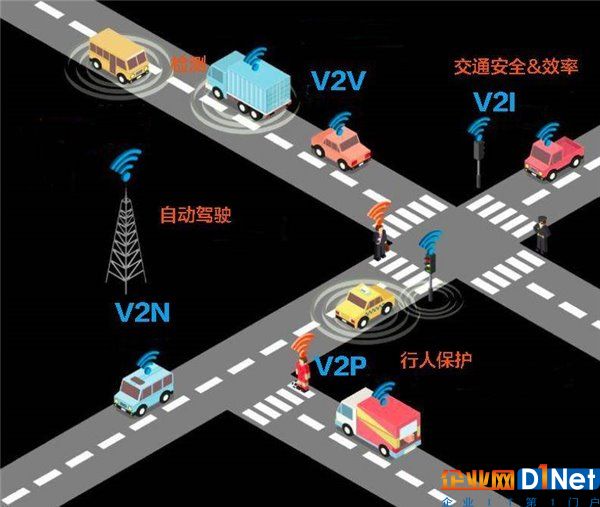
V2X主要包括V2N(車輛與網絡/云)、V2V(車輛與車輛)、V2I(車輛與道路基礎設施)和V2P(車輛與行人)之間的連接性。
2015年,3GPP在Rel. 14版本中啟動了基于LTE系統的V2X服務標準研究,即LTE-V2X,國內多家通信企業(華為、大唐、中興)參與了LTE-V標準制定和研發。2016年9月,首版涵蓋了V2V和V2I的V2X標準發布;2017年6月,進一步增強型V2X操作方案發布。
在Rel. 14中,V2V通信基于D2D(Device-to-Device)通信,其為Rel.12和Rel.13版本中的Proximity Services (ProSe)近距離通信技術的一部分。新的D2D接口被命名為PC5接口,以實現可支持V2X要求的增強型功能,這些增強型功能包括:支持高達500Km / h的相對車速、支持eNB覆蓋范圍內的同步操作、提升資源分配性能、擁塞控制和流量管理等。
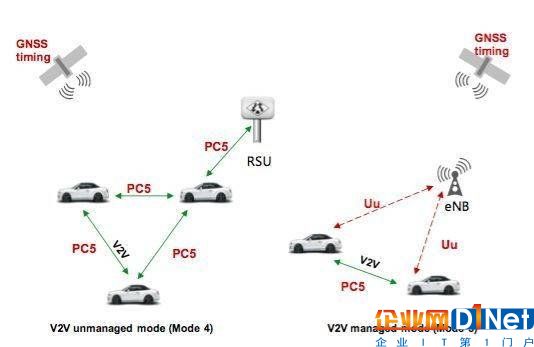
在Rel. 14中,LTE-V2X主要有兩種操作模式:通過PC5接口點對點通信(V2V)和通過LTE-Uu與網絡通信(V2N)。
基于PC5接口的V2V通信也包括兩種模式:管理模式(PC5 Mode 3)和非管理模式(PC5 Mode 4),當網絡參與車輛調度時稱為管理模式,當車輛獨立于網絡時稱為非管理模式。在非管理模式下,基于車輛間的分布式算法來進行流量調度和干擾管理;在管理模式下,通過Uu接口的控制信令由基站(eNB)輔助進行流量調度和干擾管理。
C-V2X還將持續平滑演進到5G V2X,將對功能進一步增強,以支持低延遲和高可靠性V2X服務。
除了PC5和Uu接口,C-V2X技術構架還包括V2X控制功能、邊緣應用服務器和V2X應用服務器。
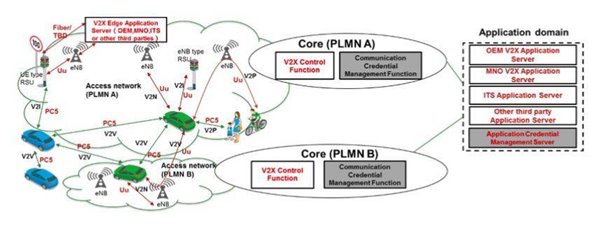
▲C-V2X技術構架,來源ngmn V2X白皮書
V2X控制功能(V2X control function)位于核心網,其為實現V2X通信向UE提供必要的參數以執行相關網絡動作。
V2X應用服務器可部署于網絡之外,由車企、移動運營商或第三方來運營,從而跨運營商跨車廠,這也解決了過去車企擔心的依賴C-V2X會導致自動駕駛業務被電信運營商所控制的問題。
邊緣應用服務器靠近數據源部署,解決了時延和網絡負荷問題,將在許多V2X用例(比如實時高清地圖更新等)中發揮重要作用。
為何自動駕駛需要5G?
目前基于LTE的V2N已經覆蓋了很多車聯網用例,比如交通信息提示、地圖更新、OTA固件更新。未來V2V和V2I將廣泛應用于車聯網的低時延、遠距離通信場景。
你可以將C-V2X看成是連接V2N和V2V/V2I的粘合劑,其依托于成熟的蜂窩網絡生態,隨著4G向5G的技術演進,將在未來自動駕駛領域發揮關鍵的作用。
1、基于5G近實時的高清視頻傳輸,V2N和V2V互補(V2N2V),如前所述,讓自動駕駛不僅能“眼觀六路”,還能“耳聽八方”,實現100%安全性。

2、5G網絡切片技術提供始終如一的QoS保障。
與互聯網“盡力而為”的數據傳輸不同,網絡切片可提供始終如一的低時延和高速率服務保障,這對于安全性要求極高的自動駕駛領域尤為關鍵。比如,當汽車行駛于網絡擁塞區域(比如演唱會、體育場附近),網絡切片技術仍然能優先保障汽車通信的高速率和低時延性能。

▲網絡切片vs無網絡切片性能監控
3、邊緣計算是自動駕駛的未來。
5G核心網控制面與數據面徹底分離,NFV令網絡部署更加靈活,從而使能分布式的邊緣計算部署。邊緣計算將更多的數據計算和存儲從“核心”下沉到“邊緣”,部署于接近數據源的地方,一些數據不必再經過網絡到達云端處理,從而降低時延和網絡負荷,也提升了數據安全性和隱私性。
這對于時延要求極高、數據處理和存儲量極大的自動駕駛領域而言,重要性不言而喻。未來對于靠近車輛的移動通信設備,如基站、路邊單元等或均將部署車聯網的邊緣計算,來完成本地端的數據處理、加密和決策,并提供實時、高可靠的通信能力。
是的,自動駕駛需要5G,但說到最后,對于5G自動駕駛,挑戰在哪里?
想到了兩點:
挑戰一,網絡頻繁切換。
5G無線頻率更高、覆蓋范圍小,未來城市的每個燈柱或將就是一個小基站,必然會帶來基站間頻繁切換的問題而影響自動駕駛能力,怎么破?
C-RAN(Cloud RAN)構架可大幅降低切換開銷。
挑戰二,天線怎么安裝?
今天的5G手機面臨的一大挑戰是,天線太多,手機空間太小。未來的汽車也將面臨這樣的問題。
我們掐指算一下,未來的汽車將有多少無線系統?LTE V2X(5.8-5.9GHz)、衛星定位(1.57GHz,1.1-1.2GHz,1.6GHz)、藍牙(2.4GHz)、WIFI(2.4GHz,5GHz)、3G/4G網絡(700MHz-2.6GHz)、雷達(76-77GHz)、5G NR(3.3-4.9GHz、6-80GHz)、無線充電等等。
這么多天線系統,在安裝時必須考慮汽車的擋風玻璃、金屬殼對無線信號的衰減影響,怎么破?
新材料天線、與車體集成的天線將應運而生。
















 京公網安備 11010502049343號
京公網安備 11010502049343號